一、項(xiàng)目背景
由于公司電網(wǎng)電壓波動(dòng)���,低壓電動(dòng)機(jī)及變頻器由于受到外部電網(wǎng)波動(dòng)���,導(dǎo)致非計(jì)劃停機(jī),對(duì)公司正常生產(chǎn)��、科研及項(xiàng)目造成極大影響����。經(jīng)過查找原因分析,發(fā)現(xiàn)電網(wǎng)晃電幅度和時(shí)間均超過接觸器線圈保持電壓的范圍和時(shí)限����,致使接觸器欠壓釋放,變頻器對(duì)電壓較為敏感��,電壓跌落80%以下低電壓保護(hù)功能動(dòng)作�,變頻器報(bào)低電壓故障而使變頻器停止運(yùn)行。
作為一家連續(xù)型生產(chǎn)企業(yè)���,由于受到晃電現(xiàn)象的影響����,伴隨電網(wǎng)電壓暫降,超過大約80毫秒的電壓暫降會(huì)引起各類高低壓電動(dòng)機(jī)及變頻器設(shè)備報(bào)警并非計(jì)劃停機(jī)��,對(duì)公司正常生產(chǎn)����、科研及項(xiàng)目造成極大影響,生產(chǎn)的中斷不僅會(huì)使產(chǎn)能下降���,還會(huì)影響產(chǎn)品品質(zhì)�,造成高額的經(jīng)濟(jì)損失�����。更嚴(yán)重的是有可能發(fā)生人身安全事故�。
通過和客戶詳細(xì)的溝通,分析了客戶目前的一次供電系統(tǒng)圖�����,整體了解了企業(yè)的供電現(xiàn)狀和需求�,因現(xiàn)場高壓容量等問題,無法進(jìn)行無擾動(dòng)切換���,現(xiàn)只針對(duì)低壓做抗晃電解決方案(停電或手動(dòng)倒閘不在此方案內(nèi))����。
二���、需求分析
1�����、晃電現(xiàn)象的危害
電力系統(tǒng)在運(yùn)行過程中�,由于外部線路受到雷擊�、瞬時(shí)短路等故障造成企業(yè)內(nèi)部電網(wǎng)相鄰線路短路故障、大型或大批電動(dòng)機(jī)起動(dòng)等原因���,造成電壓瞬間較大幅度波動(dòng)后恢復(fù)���,這種現(xiàn)象通常稱為晃電,持續(xù)時(shí)間0.5個(gè)周期到最長1分鐘����,幅值下降至標(biāo)稱電壓的90%-10%。
晃電發(fā)生時(shí)�,會(huì)對(duì)生產(chǎn)工藝和現(xiàn)場設(shè)備造成一系列的危害:
電壓暫降幅度過大或持續(xù)時(shí)間過長,會(huì)使電動(dòng)機(jī)���、變頻器�����、軟啟動(dòng)器等設(shè)備停機(jī)��,造成生產(chǎn)中斷����,產(chǎn)生諸如安全、環(huán)保���、廢品����、原料浪費(fèi)���、產(chǎn)量降低等一系列損失��;
晃電恢復(fù)期間�����,對(duì)大批電機(jī)的重起動(dòng)��,還會(huì)對(duì)電機(jī)再次造成大電流的沖擊��,危及設(shè)備和人身的安全�����;
2�、需求闡述
低壓側(cè)
在低壓負(fù)載側(cè)��,掛載有大量的電動(dòng)機(jī)類負(fù)荷和變頻器����,其中有些設(shè)備是生產(chǎn)工藝中的關(guān)鍵環(huán)節(jié),通常�����,400V低壓系統(tǒng)中的電動(dòng)機(jī)控制回路是接觸器控制回路��,一般交流繼電器當(dāng)電壓低于線圈額定電壓的50%�,時(shí)間超過20ms時(shí)接觸器釋放;當(dāng)電壓低于80%甚至更高�,持續(xù)五個(gè)周波時(shí)接觸器也釋放,造成低壓電動(dòng)機(jī)失電停機(jī)����。而對(duì)于變頻器��,一般都具有過壓��、失壓���、過流及瞬時(shí)停電等多種保護(hù)功能,當(dāng)遭遇“晃電”時(shí)電源電壓下降到額定電壓的70%或失電��,變頻器低電壓保護(hù)動(dòng)作關(guān)閉變頻器輸出�,電動(dòng)機(jī)處于慣性停車狀態(tài)。由于變頻器運(yùn)行指令繼電器也因“晃電”而釋放�,電源恢復(fù)正常后變頻器因沒有運(yùn)行指令而無法激活瞬間停電再啟動(dòng)功能,需人工復(fù)位解除低電壓故障才能重啟變頻器����,導(dǎo)致正常生產(chǎn)被迫中斷。當(dāng)高壓側(cè)快切方案在極端情況下��,未能實(shí)現(xiàn)快速切換�,而是通過同期或殘壓方式切換時(shí),切換時(shí)間可能會(huì)延長到200-300ms����,控制回路有釋放風(fēng)險(xiǎn)�,所以需要配置相應(yīng)的補(bǔ)充措施提高其可靠性��。
為了解決關(guān)鍵設(shè)備停機(jī)問題��,在設(shè)計(jì)改造方案時(shí)����,需要綜合考慮以下需求:
1. 當(dāng)電源失電后����,控制回路釋放,為了保證生產(chǎn)工藝不中斷�,在電源瞬時(shí)恢復(fù)時(shí)對(duì)已釋放的電氣元件立即自動(dòng)重合,使其迅速恢復(fù)連續(xù)性生產(chǎn)����。
2. 整個(gè)生產(chǎn)工藝流程是通過DCS分布式控制系統(tǒng)控制,各節(jié)點(diǎn)設(shè)備之間存在相互關(guān)聯(lián)性��,當(dāng)設(shè)備停機(jī)后��,仍需要與DCS保持正常通信�����,避免造成連鎖停機(jī)。
3. 針對(duì)重要設(shè)備的補(bǔ)充措施屬于分布式治理方案��,現(xiàn)場配置數(shù)量較多����,需要綜合考慮成本投入、安裝空間�、安裝便捷性。
4. 大量電機(jī)一起重新起動(dòng)�����,存在產(chǎn)生起動(dòng)沖擊電流的風(fēng)險(xiǎn)��,改造方案中要考慮增加相應(yīng)功能避免這種風(fēng)險(xiǎn)��。
5. 改造方案要考慮不增加新的故障點(diǎn)風(fēng)險(xiǎn)�,不改變?cè)锌刂苹芈贰?/p>
三、方案概述
方案的理念是從配電網(wǎng)系統(tǒng)的整體考慮���,立足從源頭解決問題����,對(duì)于電網(wǎng)造成的晃電治理,有兩種方式��,一種在電源端解決���,即當(dāng)外電源波動(dòng)時(shí)提供連續(xù)輸出的穩(wěn)定電源���,用以保證所帶負(fù)荷的正常工作電壓。一種在負(fù)載控制端解決���,即當(dāng)外電源晃電時(shí)敏感性電氣元件釋放后���,在電源瞬時(shí)恢復(fù)時(shí)對(duì)已釋放的電氣元件立即自動(dòng)重合���,使其迅速恢復(fù)連續(xù)性生產(chǎn)�。
目前先在負(fù)載控制端分布解決����,即當(dāng)電源晃電時(shí),配置的方案通過對(duì)負(fù)載控制回路的保持與重起或是通過對(duì)動(dòng)力回路的電壓補(bǔ)償��,實(shí)現(xiàn)設(shè)備的工作連續(xù)性�。比如UPS電源����、低電壓穿越����、馬達(dá)保護(hù)器輔助功能、抗晃電模塊�����。
> UPS電源:通過串聯(lián)UPS電源����,保證負(fù)載在晃電時(shí)供電連續(xù),正常工作����,在線式UPS切換時(shí)間短,滿足要求���。由于是采用串接方式�,首先會(huì)增加故障風(fēng)險(xiǎn)�����,另外,電源支撐裝置的容量需與實(shí)際所帶的負(fù)荷容量匹配�����,特別是對(duì)于大功率設(shè)備����,造價(jià)太高,安裝位置較為分散���,數(shù)量較多���,這樣核算下來投入總成本巨大,而且用于儲(chǔ)能的蓄電池����,對(duì)環(huán)境要求高�,需要定期更換,后續(xù)維護(hù)成本也很高���。
> 低電壓穿越裝置:主要針對(duì)變頻器設(shè)備�,當(dāng)晃電發(fā)生�,裝置通過內(nèi)部BOOST升壓模塊���,對(duì)變頻器直流母線進(jìn)行補(bǔ)償,維持變頻器正常工作����。此方案成本也較高,只針對(duì)生產(chǎn)工藝中關(guān)鍵的變頻器節(jié)點(diǎn)�。
> 馬達(dá)保護(hù)器輔助功能:裝置以保護(hù)功能為主,抗晃電功能為輔助功能�����,只是以繼電器信號(hào)開出為存在����,馬達(dá)保護(hù)內(nèi)部無儲(chǔ)能電源,發(fā)生晃電后裝置無法正常工作��,此時(shí)與DCS的傳輸信號(hào)(如:運(yùn)行��、故障等信號(hào))容易丟失��。當(dāng)控制回路再來電后���,馬達(dá)保護(hù)需要對(duì)停電前的工況進(jìn)行判斷���,是否能夠再次起動(dòng)電機(jī)���,判斷時(shí)間過長,無法對(duì)電機(jī)的再起時(shí)間進(jìn)行控制����。對(duì)于變頻器無法實(shí)現(xiàn)再起。
> 抗晃電模塊:晃電發(fā)生時(shí)���,通過內(nèi)部超級(jí)電容保證模塊正常工作��,恢復(fù)供電后���,通過內(nèi)部繼電器吸合,分批自動(dòng)再起動(dòng)電機(jī)�、變頻、軟啟動(dòng)�����。體積小巧����,磁吸結(jié)構(gòu),安裝方便�。
綜合考慮客戶實(shí)際需求,從抗晃電效果�����、安全可靠性���、投入成本����、產(chǎn)品結(jié)構(gòu)��、改造便捷性等多方面綜合評(píng)估���,給出了DCM-621KH抗晃電模塊的整體解決方案����。
市場上抗晃電模塊有兩種方式��,分別為儲(chǔ)能保持式和儲(chǔ)能再起式���。儲(chǔ)能保持式的原理即在給接觸器提供直流或交流的輔助電源��,當(dāng)電網(wǎng)晃電時(shí)保持接觸器線圈持續(xù)的吸合電壓��,使接觸器線圈不釋放��,當(dāng)電壓恢復(fù)時(shí)接觸器主回路保持連通狀態(tài)����,則電動(dòng)機(jī)因接觸器線圈吸合得電而繼續(xù)保持運(yùn)行狀態(tài)。而儲(chǔ)能再起式的原理是晃電時(shí)保持接觸器的啟動(dòng)指令�,不保持接觸器的線圈,則接觸器會(huì)因晃電而欠壓釋放����,當(dāng)電壓瞬時(shí)恢復(fù)時(shí)由于接觸器啟動(dòng)回路為閉鎖狀態(tài),則接觸器線圈得電而吸合��,同時(shí)自保持接點(diǎn)閉合����,電動(dòng)機(jī)因得電而再加速運(yùn)行。
通過我司對(duì)客戶選擇和市場使用狀況的深入了解�����,對(duì)兩種方式做了比較和調(diào)研���,認(rèn)為儲(chǔ)能再起式較為安全����、可靠���、實(shí)用��,原因列表如下:

由于晃電的時(shí)間一般在100ms左右��,所要治理的抗晃電負(fù)載基本為風(fēng)機(jī)����、泵類變轉(zhuǎn)矩負(fù)載��,即有一定慣性����,當(dāng)接觸器、變頻器因晃電而釋放后��,風(fēng)機(jī)和水泵仍維持較高的轉(zhuǎn)速處于高慣性之中�����,當(dāng)電源瞬時(shí)恢復(fù)后,儲(chǔ)能再起式抗晃電裝置使接觸器自動(dòng)重合�����,電動(dòng)機(jī)在高轉(zhuǎn)速下再加速運(yùn)行對(duì)工藝影響不大��,同時(shí)這種控制方式對(duì)原系統(tǒng)的接線和控制方式?jīng)]有任何改動(dòng)����,由于采用并聯(lián)控制方式,即使本身設(shè)備故障也不會(huì)影響原有系統(tǒng)的正常運(yùn)行�����,這是最大的使用優(yōu)勢�,即不會(huì)因解決一個(gè)小概率暫態(tài)事件而對(duì)原來的穩(wěn)態(tài)系統(tǒng)產(chǎn)生影響。
儲(chǔ)能保持式抗晃電方式由于采用串接方式��,利用儲(chǔ)能電容放電的方式維持接觸器的吸合電壓值����,這樣增加了故障的幾率,一旦抗晃電設(shè)備出現(xiàn)故障也會(huì)導(dǎo)致原有設(shè)備非計(jì)劃停機(jī)��。還有由于晃電時(shí)保持接觸器線圈不釋放,對(duì)接觸器的物理結(jié)構(gòu)會(huì)有影響����,對(duì)接觸器動(dòng)靜觸頭頻繁分合閘的壽命有影響�。
基于以上情況的分析和調(diào)研,采用儲(chǔ)能再起式抗晃電技術(shù)較為符合和實(shí)用���。
四�、方案實(shí)施
1�、直起式電動(dòng)機(jī)
模塊工作原理為,通過采集負(fù)載的工作電源�����、接觸器線圈電壓以及控制回路電壓形成復(fù)合判據(jù)�����,起動(dòng)結(jié)束后延時(shí)5秒進(jìn)入抗晃待機(jī)模式�����,當(dāng)接觸器位置信號(hào)發(fā)生了變化時(shí)�����,內(nèi)部超級(jí)電容系統(tǒng)自動(dòng)投入,系統(tǒng)開始計(jì)時(shí)����,在設(shè)定的最長晃電時(shí)間內(nèi),如果系統(tǒng)自動(dòng)恢復(fù)了供電�����,經(jīng)再起動(dòng)延時(shí)起動(dòng)電機(jī)�����,恢復(fù)晃電前正常工況���,從而保證生產(chǎn)正常進(jìn)行����。
根據(jù)以往大量的改造經(jīng)驗(yàn)�,結(jié)合客戶實(shí)際電機(jī)二次回路,配置DCM621KH抗晃模塊,方案圖如下:

端子1和端子4為控制電源L和N����,取接觸器控制回路的控制電源�����;電動(dòng)機(jī)再起動(dòng)控制器的工作電源及檢測電壓輸入�。
端子2和端子3為接觸器狀態(tài)反饋信號(hào)及再起開出�,并聯(lián)接在起動(dòng)回路當(dāng)中;檢測并判斷接觸器的停止與運(yùn)行的不同狀態(tài)���,以及在晃電后對(duì)接觸器的再次起動(dòng)。
端子7和端子8為運(yùn)行信號(hào)���,并聯(lián)在DCS采集的運(yùn)行信號(hào)回路中��,當(dāng)晃電發(fā)生時(shí)�����,信號(hào)出口閉合反饋DCS����,防止DCS因晃電而跳閘��,回路再起后信號(hào)出口返回����。
低壓電動(dòng)機(jī)回路依據(jù)“持續(xù)生產(chǎn)����、分批改造”的思路���,進(jìn)行分批改造�����。
預(yù)計(jì)改造時(shí)間:直起式電機(jī)每抽屜約30分鐘�����。
改造完成后預(yù)期達(dá)到的效果簡述如下:
正常工作時(shí),當(dāng)手動(dòng)或遠(yuǎn)程起動(dòng)電機(jī)后�����,KM線圈得電����,KM接觸器吸合�����, DCM621KH檢測到KM吸合狀態(tài),開始充電�,5S充電結(jié)束后,進(jìn)入抗晃待機(jī)模式��,晃電發(fā)生后�,電壓暫降,KM主動(dòng)釋放�,電機(jī)停機(jī),DCM621KH內(nèi)部超級(jí)電容自動(dòng)投入�����,為抗晃電模塊正常供電�����,系統(tǒng)開始計(jì)時(shí)���,在設(shè)定的最長晃電時(shí)間內(nèi)(最長9秒),如果系統(tǒng)自動(dòng)恢復(fù)了供電���,經(jīng)再起動(dòng)延時(shí)�,裝置RS繼電器吸合��,自動(dòng)再起動(dòng)電機(jī),恢復(fù)晃電前的正常工況。
2�、變頻式電動(dòng)機(jī)
配置DCM621KH抗晃模塊,方案圖如下:
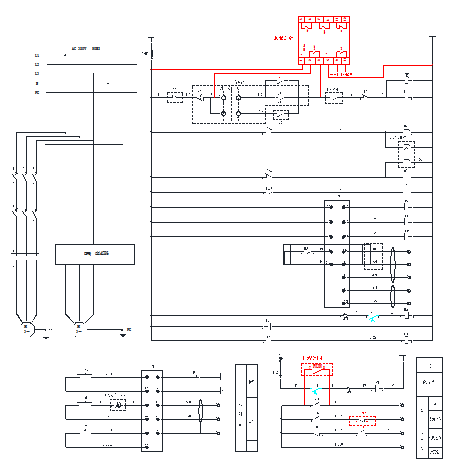
端子1和端子4為控制電源L和N,取變頻器控制回路的控制電源�����;電動(dòng)機(jī)再起動(dòng)控制器的工作電源及檢測電壓輸入����。
端子2和端子3為接觸器狀態(tài)反饋信號(hào)及再起開出,并聯(lián)接在起動(dòng)回路當(dāng)中�;檢測并判斷接觸器的停止與運(yùn)行的不同狀態(tài),以及在晃電后對(duì)接觸器的再次起動(dòng)���。
端子7和端子8為運(yùn)行信號(hào)�,并聯(lián)在DCS采集的運(yùn)行信號(hào)回路中�,當(dāng)晃電發(fā)生時(shí),信號(hào)出口閉合反饋DCS����,防止DCS因檢測到接觸器斷開而發(fā)出停機(jī)命令,回路再起后信號(hào)出口返回�����。
端子9和端子10為復(fù)歸信號(hào),并聯(lián)在DCS復(fù)歸信號(hào)回路中���,當(dāng)晃電發(fā)生時(shí)����,變頻器因晃電告警��,此時(shí)需先復(fù)歸變頻器才能再次起動(dòng)�。
端子11和端子12為報(bào)警信號(hào),串聯(lián)在DCS采集的報(bào)警信號(hào)回路中�����,當(dāng)晃電發(fā)生時(shí)����,信號(hào)出口斷開��,防止DCS因檢測到變頻器故障信號(hào)而發(fā)出停機(jī)命令��,回路再起后信號(hào)出口返回�。
預(yù)計(jì)改造時(shí)間:變頻器每回路約1小時(shí)。
改造完成后預(yù)期達(dá)到的效果簡述如下:
正常工作時(shí),當(dāng)手動(dòng)或遠(yuǎn)程起動(dòng)變頻器后�����,1KA1線圈得電,1KA1接觸器吸合�,DCM621KH檢測到1KA1吸合狀態(tài),開始充電,5S充電結(jié)束后����,進(jìn)入抗晃待機(jī)模式,晃電發(fā)生后,電壓暫降���,1KA1主動(dòng)釋放�����,變頻器停機(jī)����,DCM621KH的AL繼電器打開��,閉鎖“變頻器故障閉鎖信號(hào)”輸出����,DCM621KH內(nèi)部超級(jí)電容自動(dòng)投入,為抗晃電模塊正常供電,系統(tǒng)開始計(jì)時(shí)���,在設(shè)定的最長晃電時(shí)間內(nèi)(最長9秒)��,如果系統(tǒng)自動(dòng)恢復(fù)了供電�,裝置RE復(fù)位繼電器閉合���,復(fù)位變頻器故障����,經(jīng)再起動(dòng)延時(shí)���,裝置RS繼電器吸合����,自動(dòng)再起動(dòng)變頻器���,恢復(fù)晃電前的正常工況����。
五���、主要特點(diǎn)及基本參數(shù)
1��、主要特點(diǎn)
> 磁吸安裝�����,可靠靈活��;
> 接插端子��,維護(hù)便捷����;
> 脈沖起動(dòng)���,節(jié)能可靠����;
> 晃電時(shí)間最長達(dá)10S���,且易修改�;
> 再起動(dòng)延時(shí)可修改�,利于分批多電機(jī)環(huán)境�;
> 電壓波動(dòng)未引起接觸器釋放�����,不會(huì)對(duì)抗晃模塊產(chǎn)生影響����。
2、基本參數(shù)
> 系統(tǒng)功耗: 1W
> 安裝方式: 磁吸式
> 外型尺寸: 64mm*47mm*96mm(寬*高*深)
> 產(chǎn)品凈重: 約300克
> 適用電壓 : AC220V(可定制)
> 起動(dòng)節(jié)點(diǎn)容量: 常開�,5A 440Vac/300Vdc
> RUN信號(hào)容量:常開,超時(shí)返回����,5A 250Vac/30Vdc
> 最大晃電時(shí)間:0-9s可調(diào),步進(jìn)1S�,0時(shí)模塊退出。
> 再起延時(shí):0-1S 連續(xù)可調(diào)����,步進(jìn)0.1S
> 適用回路:直接起動(dòng)、變頻器�����、軟起動(dòng)
六����、外觀及安裝
需要對(duì)現(xiàn)場進(jìn)行方案勘察,對(duì)現(xiàn)場電動(dòng)機(jī)的運(yùn)行環(huán)境進(jìn)行探討��,確?����?够畏桨父脑旌蟮男Ч?���。DCM621KH產(chǎn)品體積小,磁吸式安裝方式(如圖1��,圖2)����,現(xiàn)場安裝方便。